June 2017 - May 2019
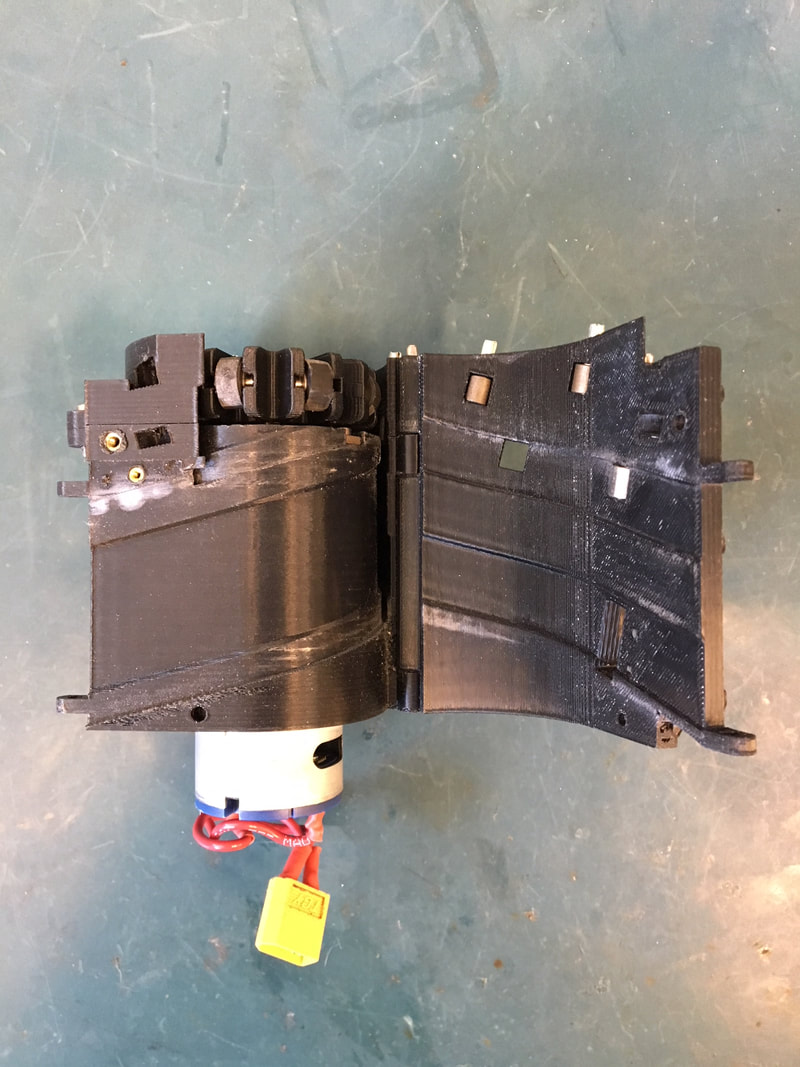
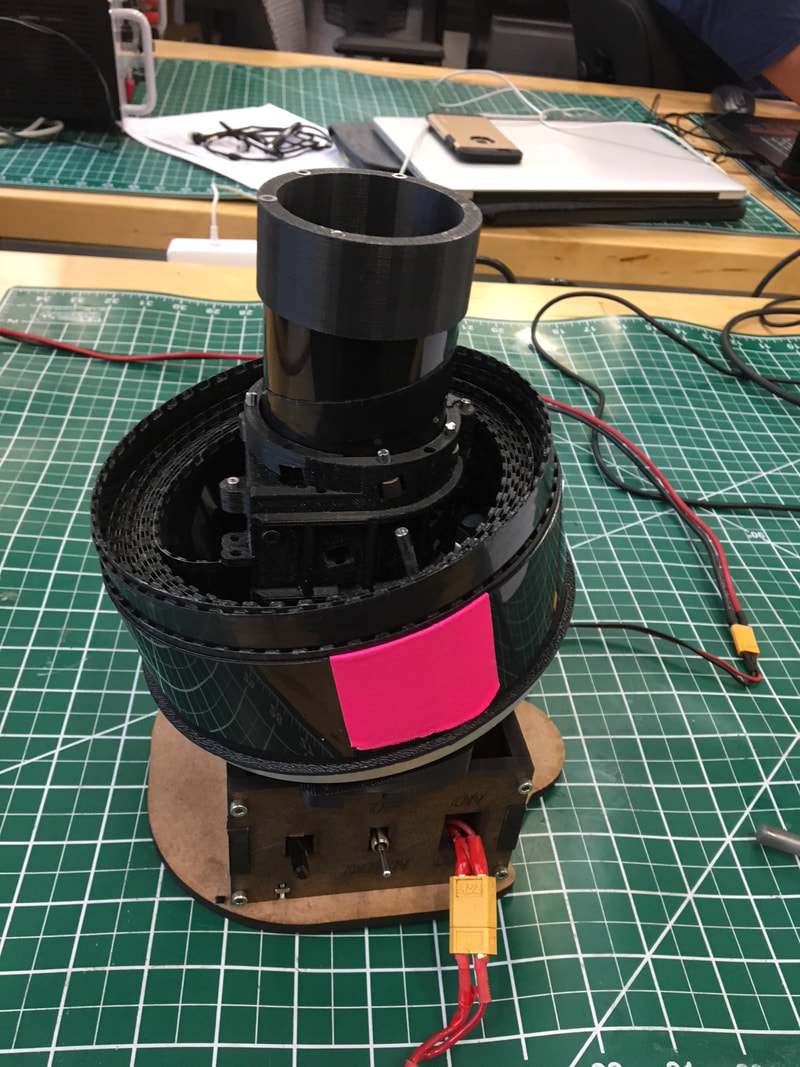
The Variable Topology Truss (VTT) is a reconfigurable truss robot developed by the Modular Robotics Laboratory at the University of Pennsylvania, under the supervision of Dr. Mark Yim. The truss beams are made of toothed bands that zip into spherical columns, known as spiral zippers. The spiral zipper mechanism has a high strength to weight ratio and extension ratio, giving the beams freedom to change length. The spiral zipper requires mechanical systems to “wind” the band into a column, and connect beams into trusses.
As a research assistant on the project, I have assisted with mechanical design and reliability testing for the hardware components of VTT. By working to improve components by iterating on previous designs, I have learned to analyze and understand complex mechanical systems. Additionally, I have gained experience in creating thorough documentation of my work to relay information to other members of my project team.
The Variable Topology Truss (VTT) is a reconfigurable truss robot developed by the Modular Robotics Laboratory at the University of Pennsylvania, under the supervision of Dr. Mark Yim. The truss beams are made of toothed bands that zip into spherical columns, known as spiral zippers. The spiral zipper mechanism has a high strength to weight ratio and extension ratio, giving the beams freedom to change length. The spiral zipper requires mechanical systems to “wind” the band into a column, and connect beams into trusses.
As a research assistant on the project, I have assisted with mechanical design and reliability testing for the hardware components of VTT. By working to improve components by iterating on previous designs, I have learned to analyze and understand complex mechanical systems. Additionally, I have gained experience in creating thorough documentation of my work to relay information to other members of my project team.