MEAM 510 - Fall 2018
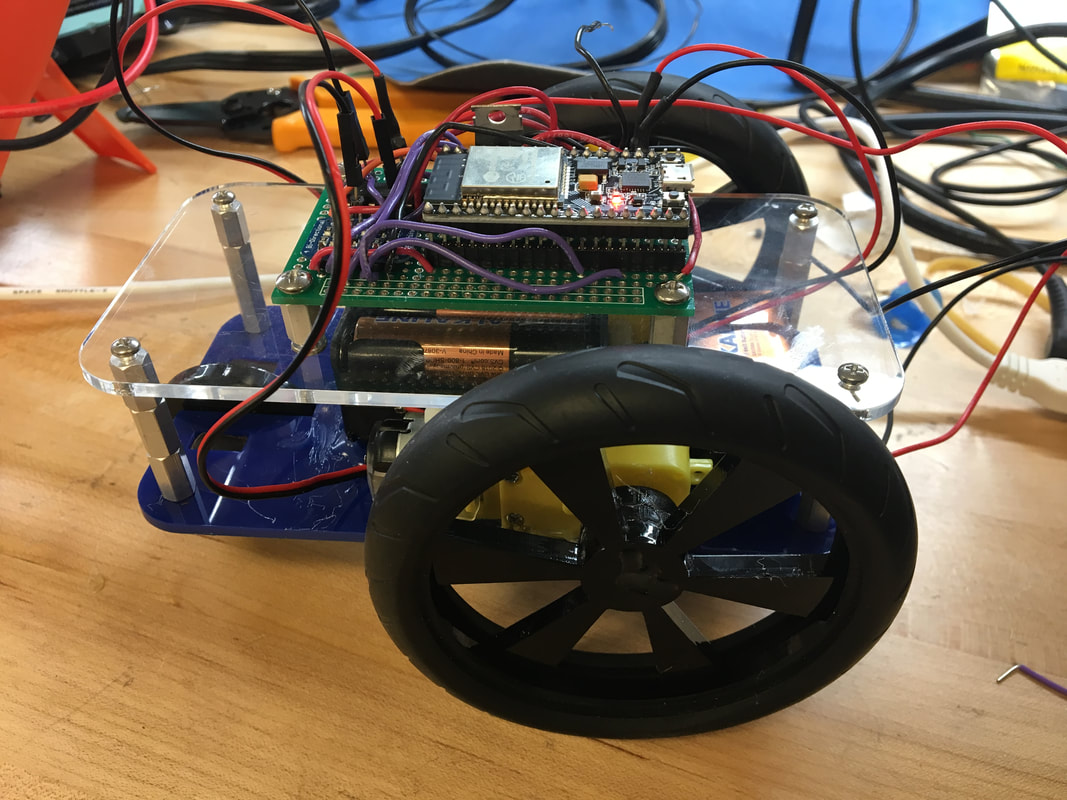
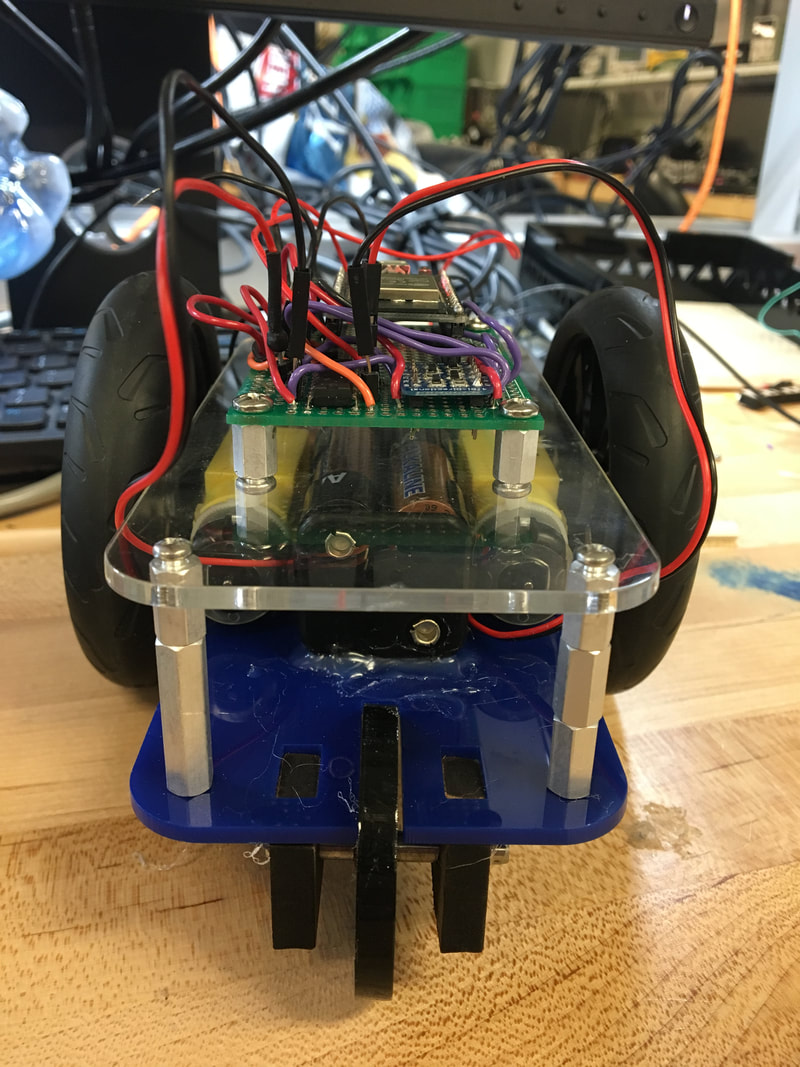
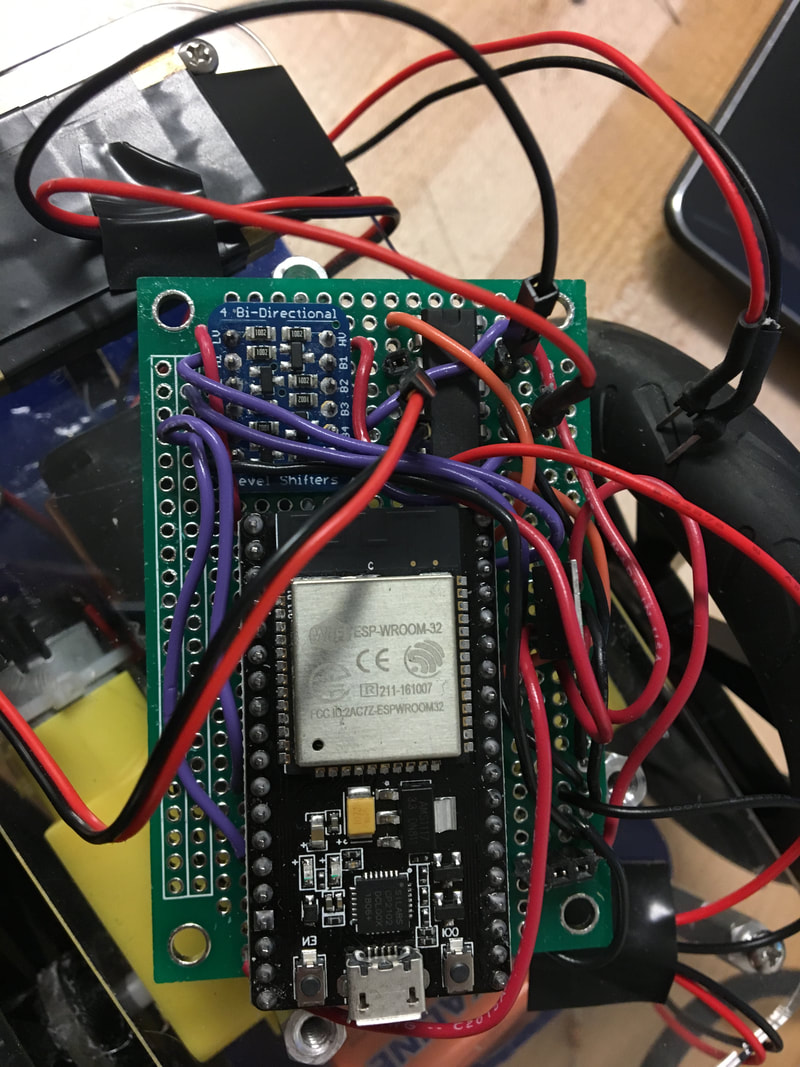
I worked with Avery Price to design a remote-controlled car to traverse a race course containing inclines and turns. My role in the project was to design mechanical components, set up and solder electrical components, and write code for the car. Both the car and its controller are controlled by ESP32 microcontrollers that communicate via UDP packets sent over WiFi. We used pulse width modulation and a differential drive system to enable the car to turn and change directions. The car and controller are completely wireless and run on battery power.
I worked with Avery Price to design a remote-controlled car to traverse a race course containing inclines and turns. My role in the project was to design mechanical components, set up and solder electrical components, and write code for the car. Both the car and its controller are controlled by ESP32 microcontrollers that communicate via UDP packets sent over WiFi. We used pulse width modulation and a differential drive system to enable the car to turn and change directions. The car and controller are completely wireless and run on battery power.